유리 기판용 로봇
LVHR3440S (유리 기판용)3축 원통 좌표형 진공 대응 클린로봇

|
환경/사양피반송물
|
제품형식 리스트
| 제품형식 & 승강 거리 | |||
|---|---|---|---|
| LVHR3440S-020-SM | 20mm | ||
| LVHR3440S-032-SM | 32mm | ||
| LVHR3440S-040-SM | 40mm | ||
| LVHR3440S-060-SM | 60mm | ||
| LVHR3440S-320-SM | 320mm | ||
제품특징
유리 기판 대응 3축 원통 좌표형 진공 대응 클린로봇 LVHR3000 시리즈
액정 제조 장치 내부나 검사 장치 등의 유리 기판 반송에 적합합니다.
- 암 동작 범위:330mm, 440mm, 500mm, 550mm
- 암 관절부에는 자성 유체 실 설치
- 진공 실 : 자성 유체 실 및 벨로스 사용
- 클린 대책 : 진공 라인에 5µm 메시필터를
- 설치동작 모니터 장비
- 제어 방식 : RS232C 및 병렬 포트 I/O
- 전축 AC 서보 모터 사용
- S자 가감속 제어로 웨이퍼를 고속, 고정밀도로 반송
- 척 재질은 CFRP, 알루미늄, 세라믹 등 각종 재질 사용 가능
- 피반송물, 장치 레이아웃에 가장 알맞은 척으로 대응 가능
표준사양
| 로봇 사양 | ||||
|---|---|---|---|---|
| 로봇형식 | LVHR3440S-040-SM | |||
| 피반송물 | 730×920×1.1mm 유리 기판(대표적인 예) | |||
| 기계구조 형식 | 원통 좌표형 | 제어축 | 3축 | |
| 모터 타입 | AC서보모터 | |||
| 동작 범위 | 암 3관절 중심거리 | 선회(θ축) | 상하(Z축) | |
| 880mm | ±182deg | 40mm | ||
| 반송 속도 | 제(R축) | 선회(θ축) | 상하(Z축) | |
| 1320mm/2.7sec | 180deg/1.8sec | 40mm/2.0sec | ||
| 분해능 | 제(R축) | 선회(θ축) | 상하(Z축) | |
| 13.5µm 이하 | 0.00097deg | 0.61µm 이하 | ||
| 반송 레벨 | 168.5mm(플랜지 설치면에서 위쪽 척 반송면까지) | |||
| 반복 정밀도 | ±0.2mm以内 | |||
| 클린도 | 자성 유체 실에 의한 대책 | |||
| 내진공도 | 1.33×10-6Pa | |||
| 유틸리티 | 전원 AC200V±10% 2kVA | |||
| 콘트롤러 사양 | ||||
| 콘트롤러 형식 | C5000S시리즈 | |||
| 인터페이스 | RS232C 및 병렬 포트 I/O | |||
| 외관(표준사양) |
|---|
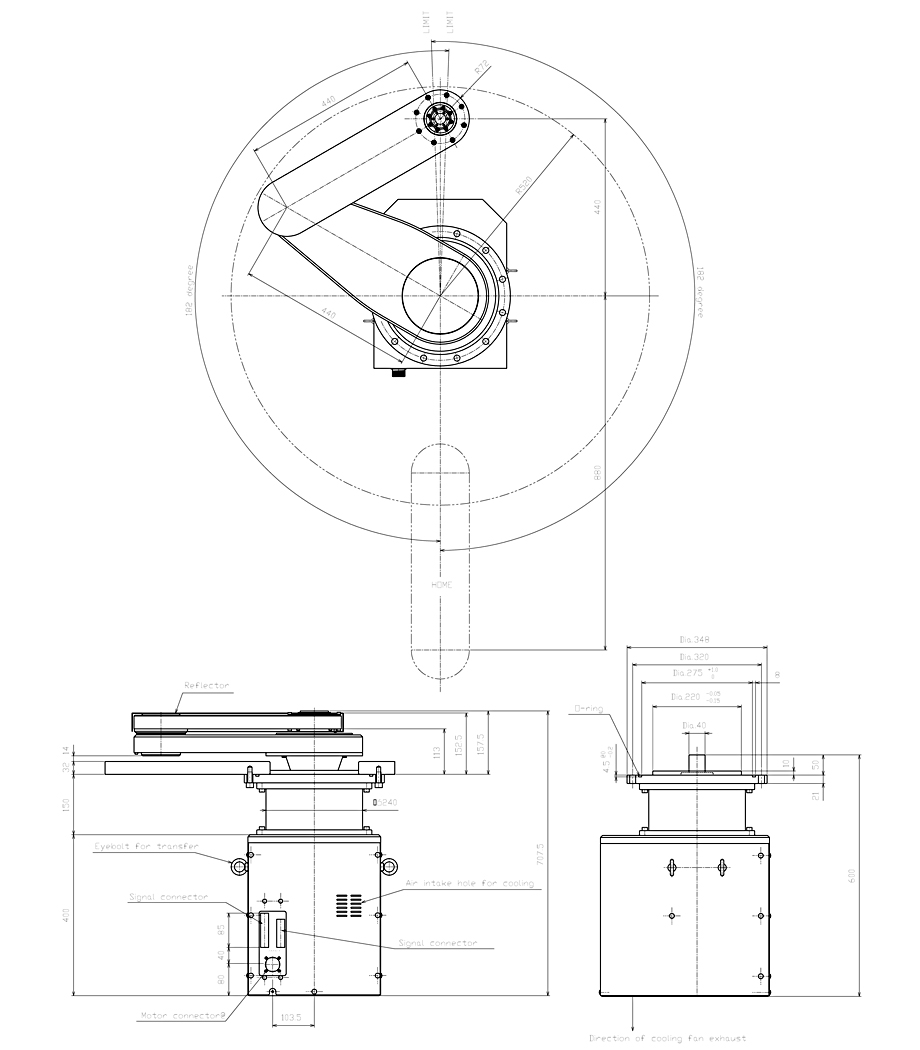
|
가이드
- ...대기
- ...진공
- ...방수
- ...싱글 암
- ...트윈 암
- ...얇은 웨이퍼
- ...CE 마킹
- ...JEL표준
- ...KCs 마킹